共振的品质因子(Q)是描述振荡的阻尼性质的物理量。它被定义为共振的中心频率与它的半功率带宽的比值。一个高的Q值意味着低阻尼和较小的能量损失率。在这种情况下,共振可称为欠阻尼。
欠阻尼共振有几个特点,可以在图上识别。在设置或运行具有潜在高Q值共振的正弦测试时,了解这些特点是有益的。其实所有的共振都是如此,但当Q因子较高时,这些特点会更加明显。
高Q值共振的四个特点
频域上振幅变化很大
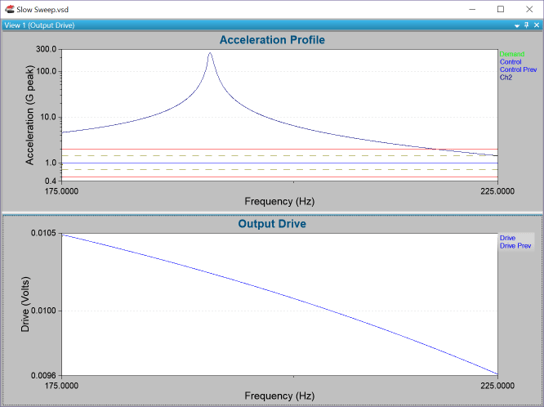
这个特点是四个特点中最明显的。频率的微小变化,就会导致振幅的巨大变化。
当你控制一个共振较大的通道时,输出的响应必须跟上变化。控制算法应该足够快,以满足需求。如果没有,可以检查VibrationVIEW中设置,看是否有相关的参数设置限制了控制。建议检查以下两个参数:
- 增加速率&降低速率
增加速率和降低速率,控制了驱动输出对输入变化的反应速度。参数中的单位是dB/s,而图表中的单位是分贝/分钟。
- 扫频速率
通过放慢扫频速率,频率(因此也包括振幅)的变化就不会那么快;所以,驱动也不需要变化得那么快。正弦扫频越慢,控制的机会就越多。然而,这会引出另一个问题,测试在共振处停留的时间更多,运行的时间更长。
响应时间慢
共振需要时间才能对刺激做出反应。它的响应与共振带宽成反比。
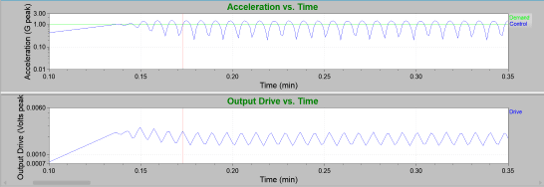
系统的响应时间应小于共振的响应时间。如果控制比共振改变的速度快,就会发生振荡。原因如下:
如果控制值高于命令值,为了使控制满足命令,VibrationVIEW 软件将会降低驱动输出。然而,当驱动下降时,控制仍会上升,因为这是它对之前的驱动输出的反应。同样,控制值低于命令值的时候,VibrationVIEW软件又会增加驱动输出来增大控制值。这会引起振荡。
系统的响应时间应该比共振响应时间更慢。我们建议检查两个参数:响应时间和输入滤波器。输入滤波器的响应与它的带宽成反比。系统的响应时间由响应时间或跟踪滤波器的带宽决定,以并较小者为准。
长衰荡时间
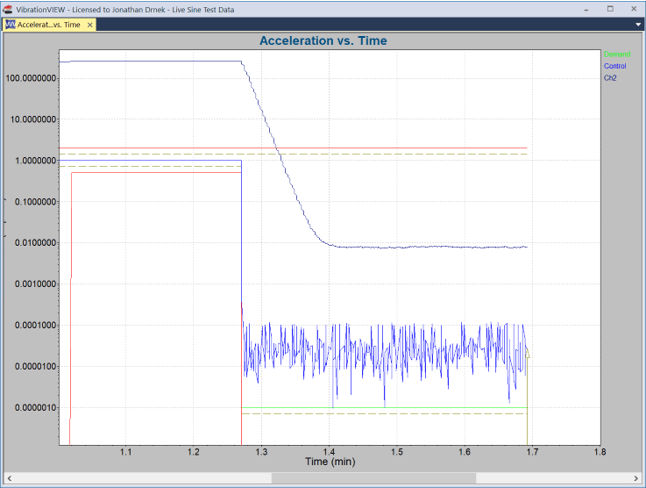
共振的衰荡时间与它的带宽成反比。一个较窄的(高Q值)共振将有一个较长的衰荡时间。从控制的角度来看,这可能会带来新的问题,因为它会导致拍频。
然而,测试工程师不应试图控制这个特性,因为它属于物理特性,也会导致控制不好。相反,我们建议调整响应时间参数,回避对该特性的控制。
共振点随幅值的变化
共振点会随着响应通道的振幅而变化。这一特性在低量级扫频和高量级驻留时有影响。许多人在高量级的驻留前,用低量级的扫频来寻找共振点。那么该特点就该引起注意。
为了避免共振漂移,你可以考虑以下几点。
- 设置恒定的加速度幅值。
- 响应通道限幅在一个固定的幅值。SRTD控制会更容易;但是,离峰
值太近的限幅会导致震荡。
- 从一个较高的频率开始SRTD测试,向下扫到共振点处。
- 使用VibrationVIEW中的峰值追踪功能。
SRTD 测试
在VibrationVIEW中,使用先进的相位追踪控制来追踪高Q值或尖锐的共振,可以通过相位与传递率的方式来调控共振并保持峰值振幅。当运行具有高Q共振的SRTD时,我们建议如下:
- 确保共振设置不要太快。
- 使用SRTD控制按钮,找到峰值传递率时的相位。
- 在传递率与相位的图中,找到一个峰值。
要了解更多关于VibrationVIEW SRTD软件的信息,请访问软件页面或下载该软件的免费演示。

欢迎您关注VR公众号!